Innovation & Expertise
Deep Maze AI는 독보적인 3D 알고리즘과 하드웨어 최적화 기술을 바탕으로 미래의 공간 지능을 구축하고 있습니다.
History
2026년 TIPS STAGE 데모데이 선정
18기 기보벤처캠프 선정
Seed Potential 선정
경희대/빅데이터 AI GAIA-Alliance
기업부설 연구소 설립
초기창업 패키지(딥테크분야) 선정
Technology
3D Vision
3D Point CloudVoxel/Mesh
Computing
OptimizationJetson OrinIntel MiniPC
Visualization
Open3D Viewer3D renderingWeb visualizer
Core Tech Stack
Visualization & Interface
사용자 중심 3D 렌더링 및 인터랙션
Open3D Viewer3D RenderingWeb VisualizerReal-time Sensor/Motor Monitoring
AI & 3D Core Algorithms
공간 지능을 위한 독자 알고리즘
Scene ReconstructionPoint CloudVoxel/MeshSLAM
Compute Core Optimization
Edge AI 성능 최적화
CPU/GPU OptimizationIntel-miniPCJetson OrinTensorRT
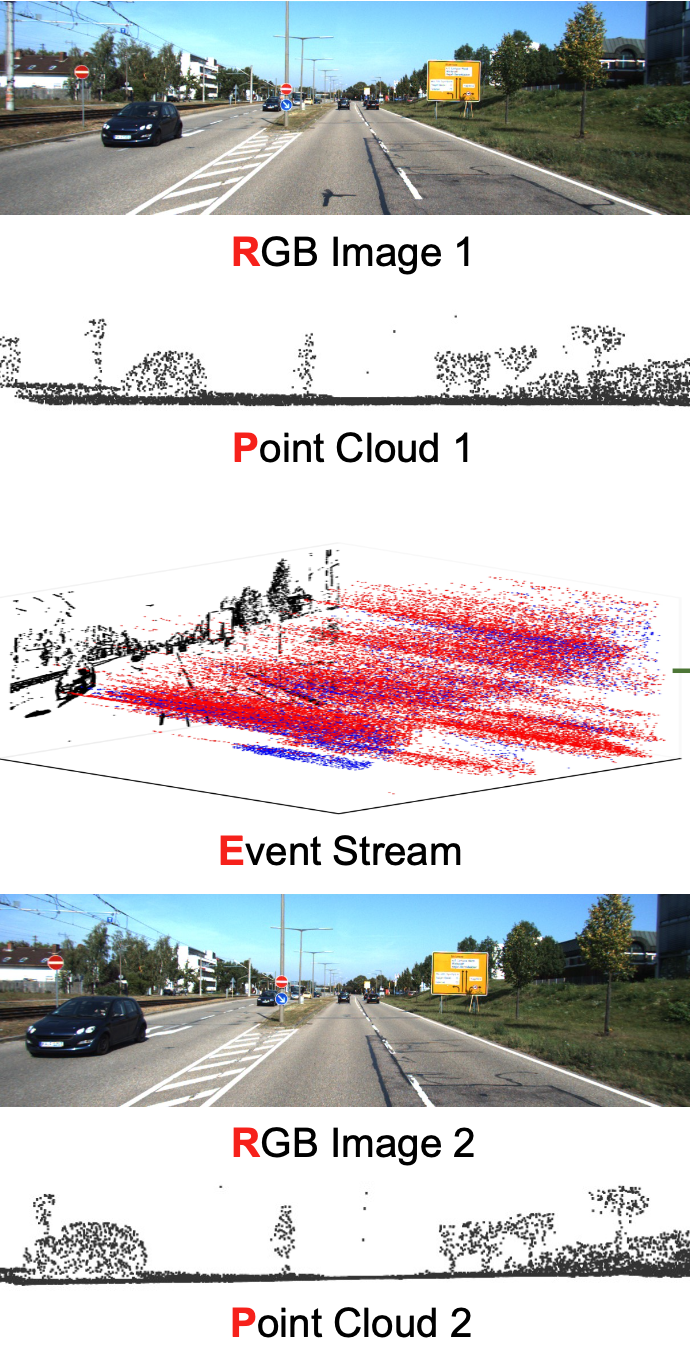
Sensor Fusion
멀티모달 공간 데이터 센싱
LiDARIMURGB-DRadarNeuromorphic Sensors
Solution
심도 센서(ToF) 보정
심도 센서(ToF) 자체의 모션블러를 감지하고 보정(De-blur)하는 기술

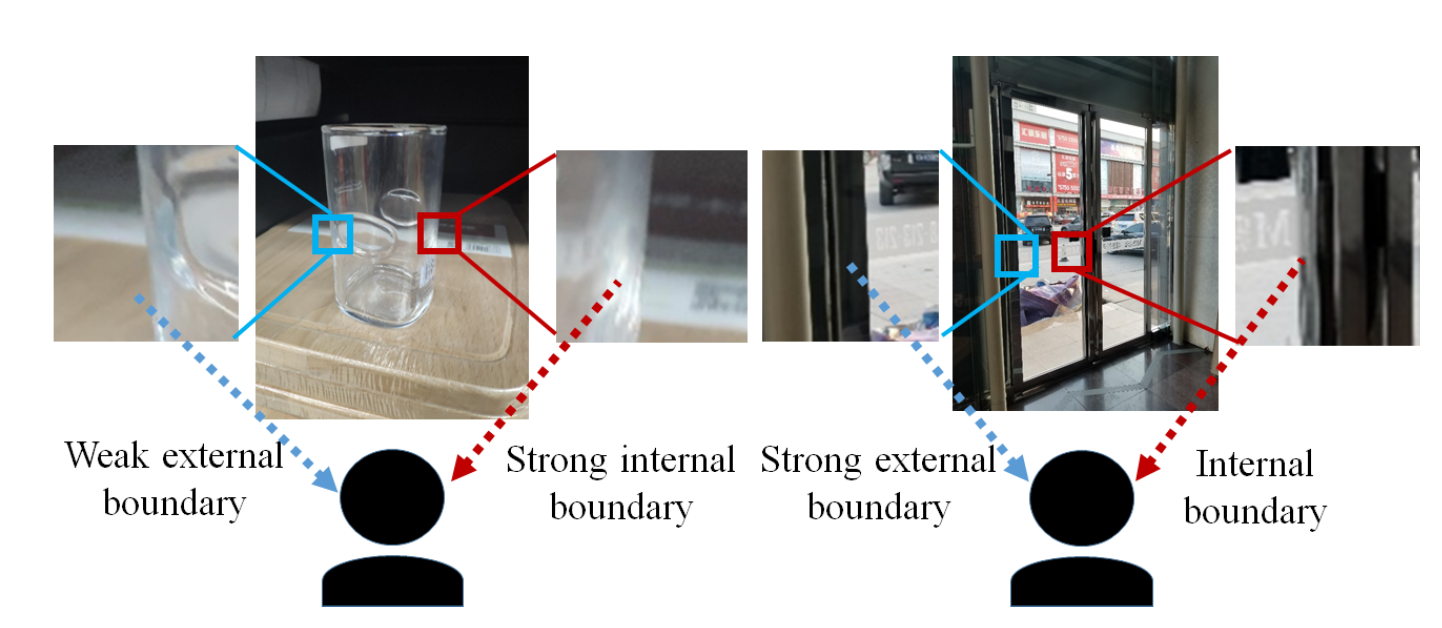
투명/반투명 객체 3D 복원
유리컵, 창문, 플라스틱 등 투명/반투명 객체 복원 기술
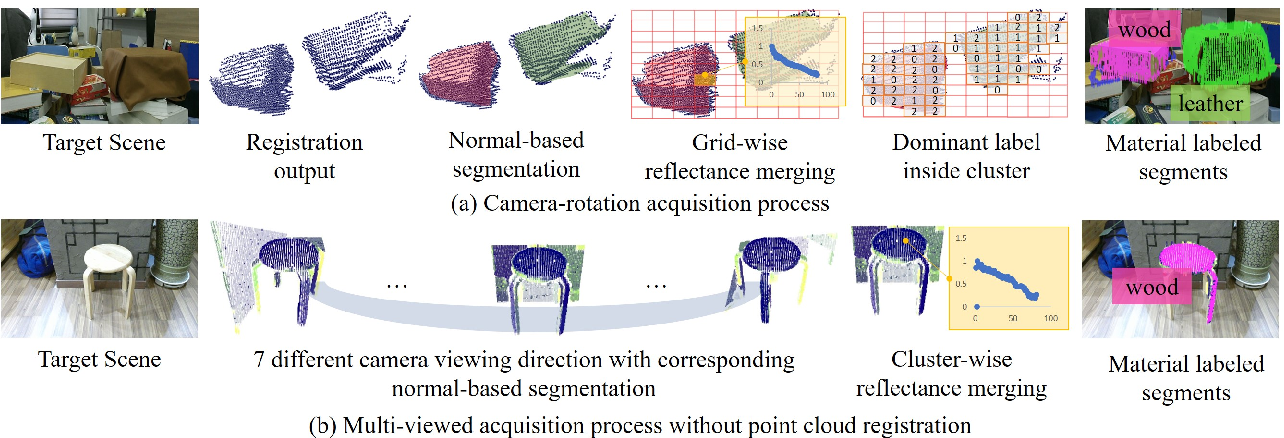
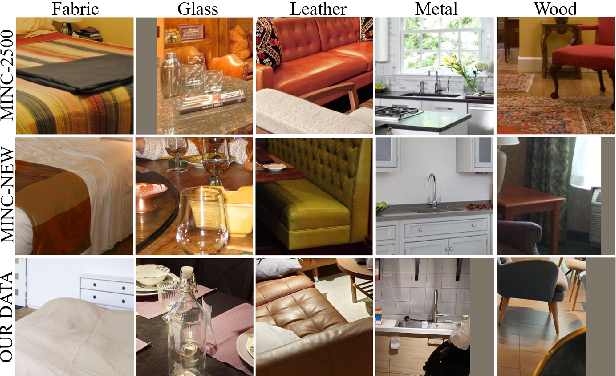
재질 추정 기술
IR 반사율 기반 표면 Texture 추정 기술
3D Point Cloud 생성
기존 3D 센서의 한계를 극복하고, 서비스 로봇이 어떤 환경에서도 정확하게 보고 반응할 수 있도록 만드는 센서퓨전 기술로 효율을 향상합니다. 복잡한 데이터를 단순하고 의미 있는 정보로 전환하여 효율성을 증대시킵니다.
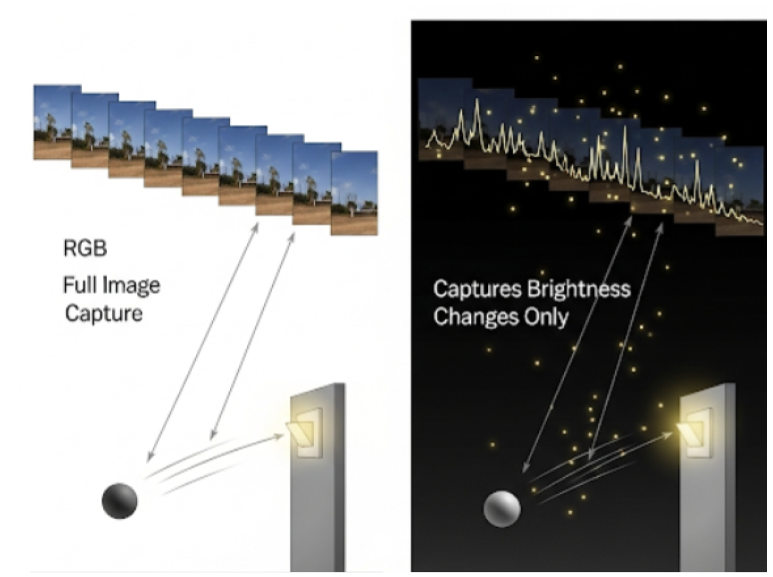
조도변화 및 불투명 객체 이미지 전처리
이벤트발생에 따른 거리 측정
이미지 처리 성능 향상30%
인식률 정확도 향상99.9%
배터리 성능 향상41%
Intellectual Property
특허:
3
3D 센서 퓨전 관련 특허
심도 센서 보정 관련 특허
비동기식 지능형 거리측정 관련 특허
논문:
3
ToF 센서 블러 보정 연구
투명/반투명 객체 3D 복원 연구
재질 추정 기술 연구(IR 반사율 기반)
인증:
3
품질경영시스템 ISO9001
환경경영시스템 ISO14001
안전보건경영시스템 ISO45001
Use Case
Contact US
본 사 | 경상북도 포항시 남구 중흥로 152번길 27, 1층
연구소 | 경기도 성남시 수정구 금토로 80번길 40, 3층
info@deepmaze.net
구글 맵에서 기업부설 연구소 위치 보기